

受液体表面张力启发的变形车轮可彻底改变全地形导航技术

韩国机械与材料研究院的研究人员开发出了一种下一代车轮系统,该系统受液滴表面张力特性的启发,可实时调整车轮刚度。受液滴表面张力特性的启发,开发出了一种能实时调整刚度的下一代轮子系统--这是一种首创的设计。它为机器人和运输系统平衡速度和障碍物导航这一长期难题提供了一个前景广阔的解决方案。
现在,可变刚度车轮和自适应移动系统的概念并不特别新鲜,尤其是在机器人和车辆应用领域。然而,这项技术的独特之处在于其特定的表面张力启发机制,它可以实时调整车轮的刚度和形状。
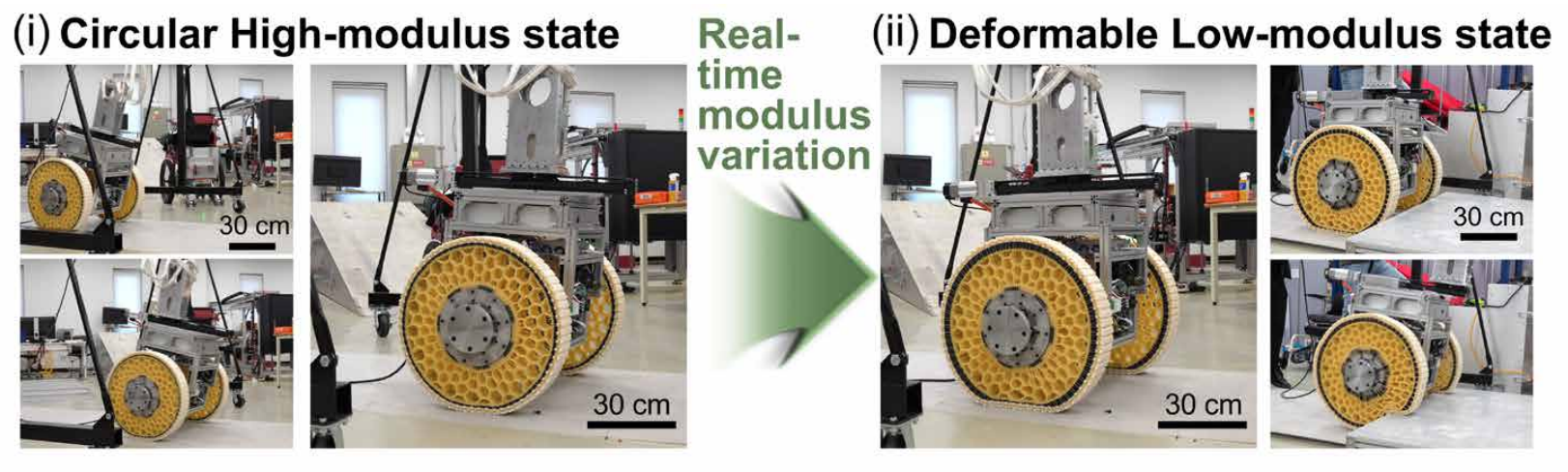
传统车轮在平坦路面上行驶效率很高,但在遇到障碍物时就显得力不从心,这往往导致在移动性和稳定性之间进行权衡。为了解决这个问题,研究小组设计了一种 "可变刚度变形车轮",它可以在用于高速运动的刚性圆形和用于在崎岖地形上行驶的柔软可变形状态之间转换。
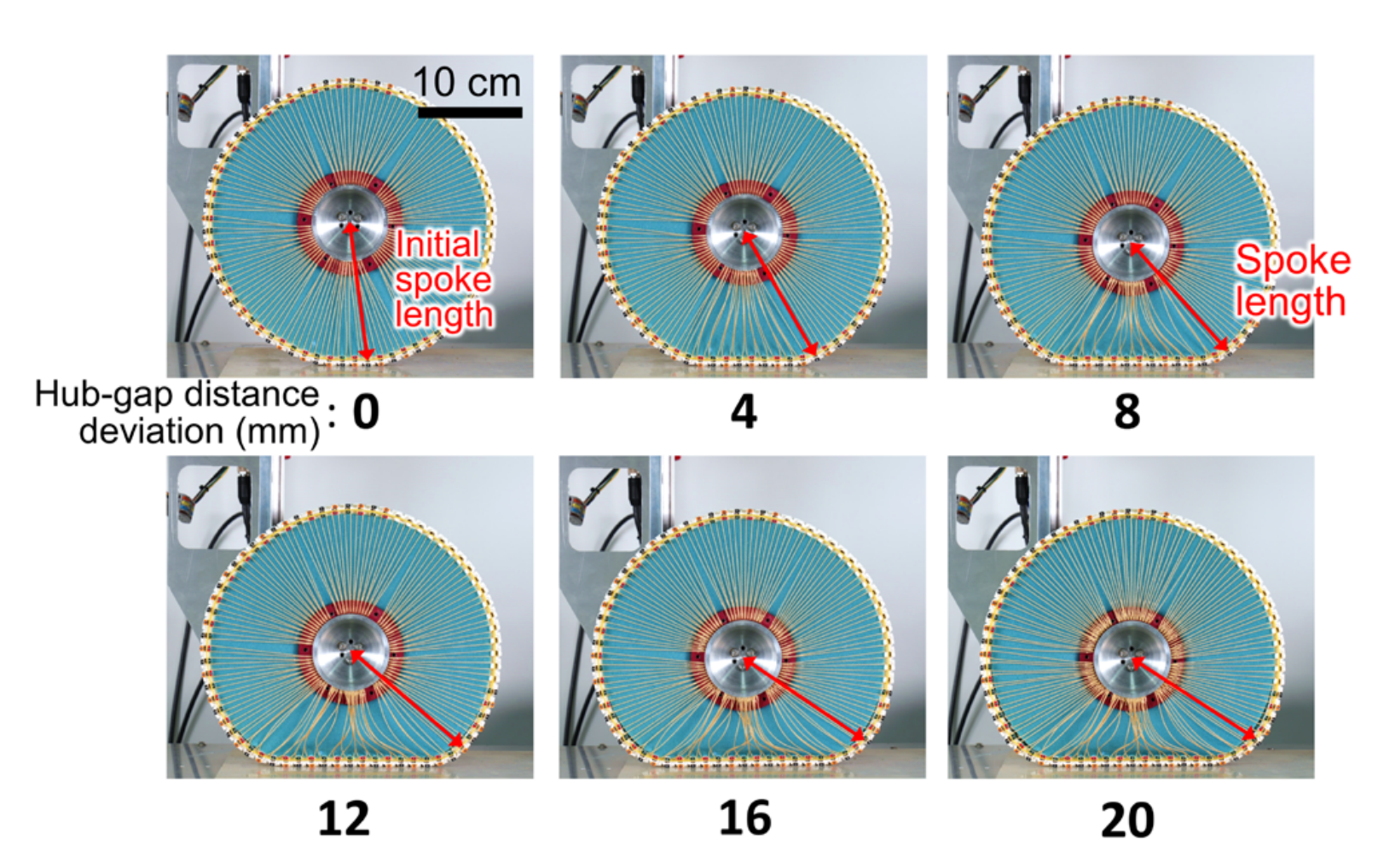
通过调整与车轮周围的智能链条结构相连的钢丝辐条的张力,可以控制车轮的刚度和形状。这样,车轮就能在光滑的路面上保持形状,并在遇到障碍物时发生变形。这就像表面张力将液滴拉回圆形一样。
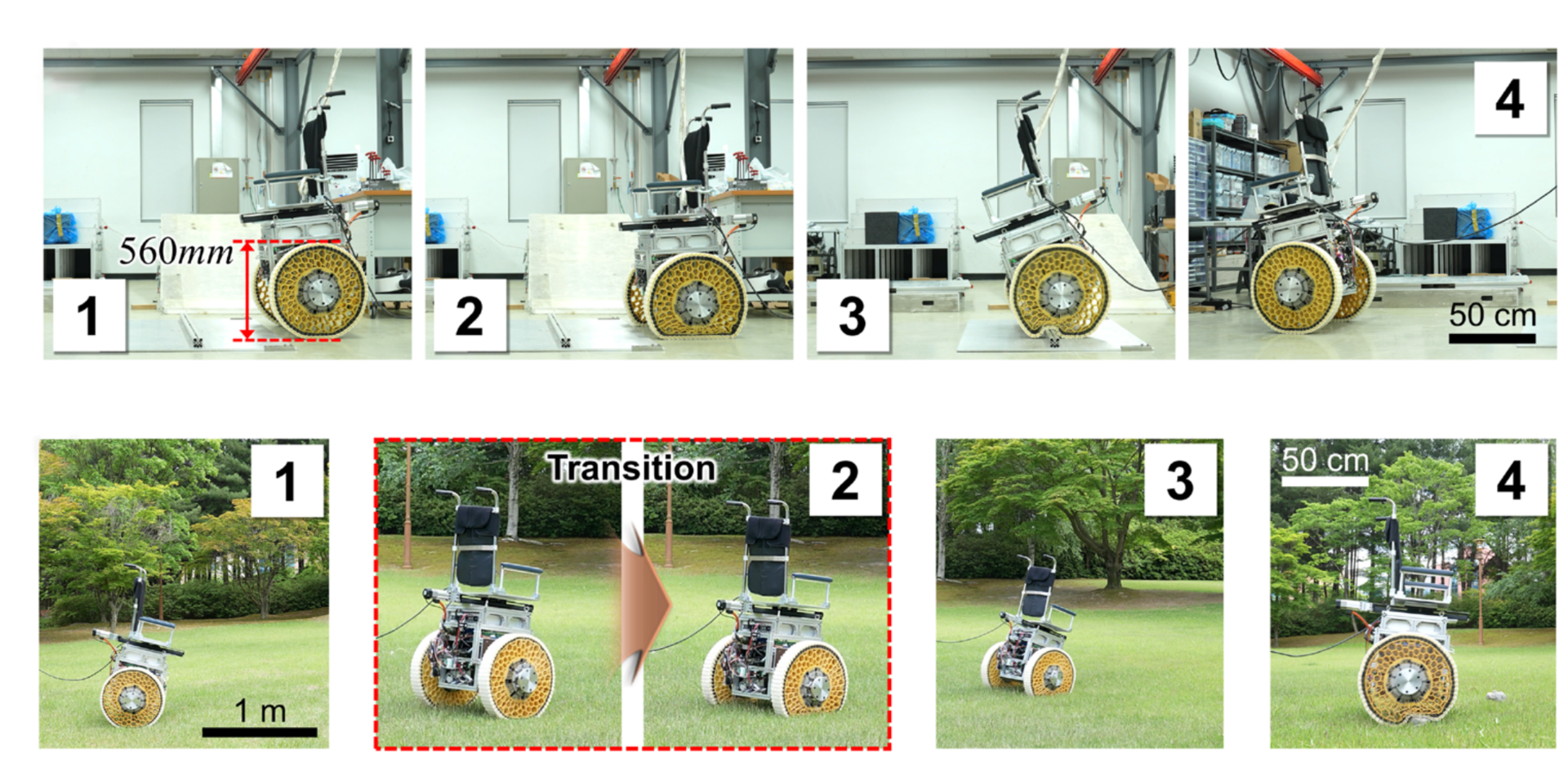
对双轮轮椅系统的测试表明,这种轮子能够在不同状态之间实时切换,使其能够爬过半径达 40% 的障碍物。与传统轮子相比,它已经有了相当大的改进,并有望应用于各种移动系统,包括 机器人和车辆。
研究论文还提到了未来的改进措施,如提高轮子的耐用性,将其集成到更复杂的系统中。总而言之,这种轮子可以成为机器人和车辆在充满挑战的环境中航行的可靠升级工具。例如,它可以提升全地形机器人的机动性,使其更适合在灾区执行搜救任务。它还能提高越野车和轮椅的性能,使它们能更轻松、更稳定地穿越不平路面和障碍物。
资料来源








