

为母亲(r)kers准备的圣诞节。由机器人制作的个性化圣诞树装饰品
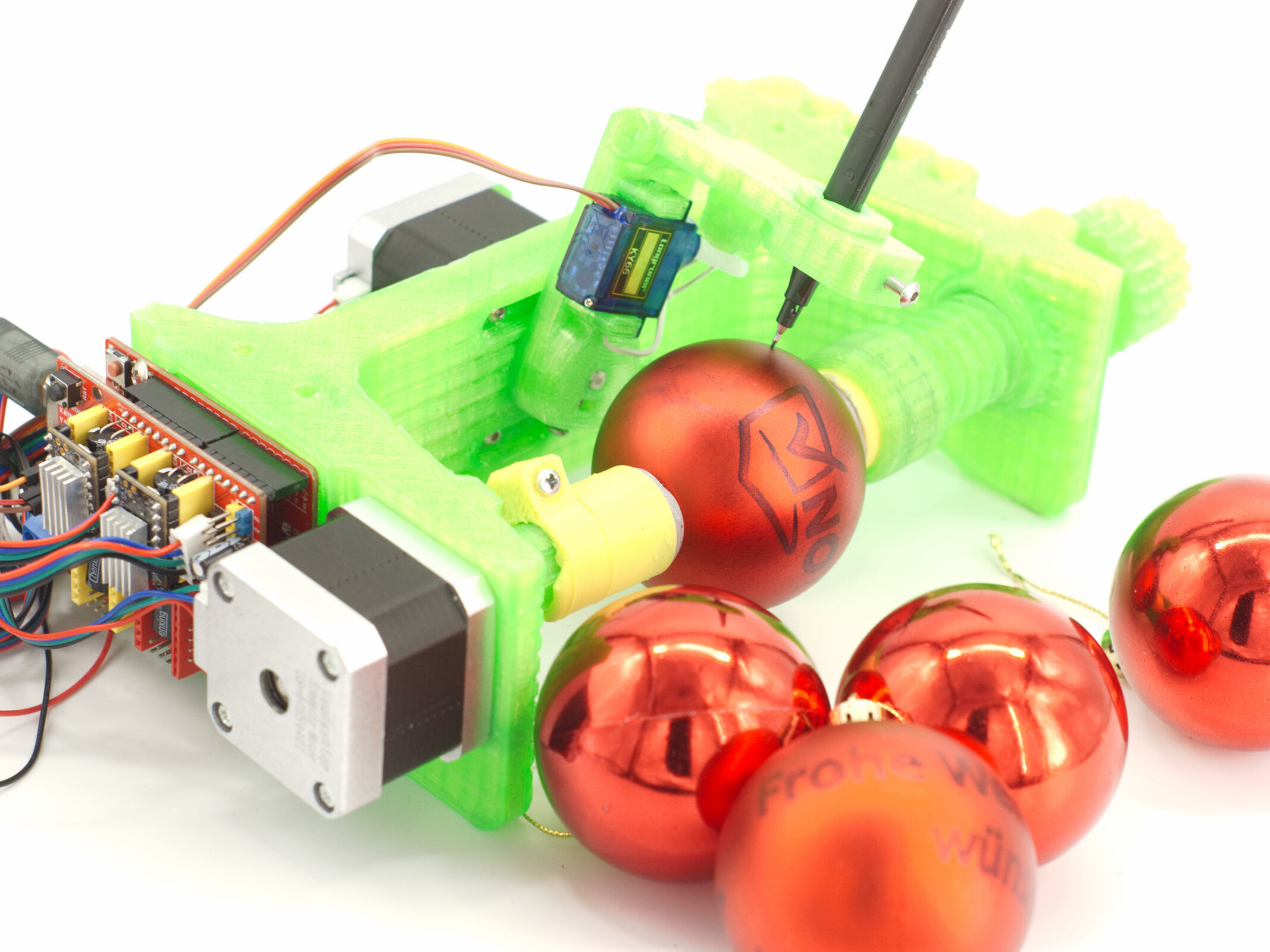
球形机器人或蛋形机器人在任何圆形的东西上从PC上绘制图案。通过thingiverse.com和 instructables.com,人们可以找到一些小机器人的教程和模板,它们也可以被称为球形绘图仪。大多数球形机器人的材料清单都很相似。需要两个Nema 17电机,一个小伺服,一个Arduino Uno,一个CNC盾牌和步进电机驱动器。此外,它还需要一个电源、螺丝、电缆、球和配套的标记。在亚马逊上,完整的材料清单的标价是50美元左右。如果你有一台3D打印机,你可能可以借用它昂贵的Nema 17电机和步进电机驱动器来做这个项目。

说明书和建造手册
在各种DIY网页上有许多或多或少的简单说明,如instructables和thingiverse.他们中的大多数可以用3D打印机制作。至少有20个这样的Eggbots可以通过thingiverse.com找到不同的名字。我已经把,在这里收集了一个小的选择.足智多谋的业余爱好者也许可以不用3D打印机来做一些设计,只用胶合板、螺丝、滚珠轴承和一些支架就可以了。我选择了Herbert Schützeneder的设计,我认为它非常聪明。他的Eggbot的大部分零件都是3D打印的。基本上,大多数Eggbots的购物清单是非常相似的。这也是因为,邪恶的疯狂科学家的原创作品已经作为一个开源项目存在了好几年。因此,在大多数情况下,只需要进行调整就可以使复制品适应不同的制造方法。
Herbert_b1的Eggduino的BOM。
2 ×Nema 17步进电机
1 ×带Arduino Uno克隆的CNC-工具包
1 ×伺服电机SG90或KY66
1 × M3螺钉
1 × 608球轴承
1 × 10 µF至100 µF的电容器
1 × AC/DC转换器,提供12 V和24 V之间的电压
一些(永久)标记物

在我的例子中,步进电机和TMC2100步进电机驱动器来自一台不再使用的3D打印机。由于Arduino Uno克隆机是由USB供电的,所以较高的电压对CNC-Shield来说是一个优势。有了更高的电压,可以用更小的电流驱动电机。这导致电机和电子元件的散热更少。我也不用买滚珠轴承,因为608滚珠轴承与滑板和直排轮滑鞋中的轴承相同。
软件--下载、安装和修改
Arduino Uno(克隆)可以使用Arduino IDE进行编程。该应用程序可以从www.arduino.cc/en/software或从各种渠道获得。在Windows上,该应用程序也可通过微软商店,以供安装。.
为了创建圣诞树球的图像和图案,开放源码应用程序Inkscape与EggBot扩展是必需的。最新的1.1版本可以通过 发布页面下载。.
在Github的Eggbot仓库中,有一个用于Arduino Uno(克隆)的即用型固件,作者是Plex3r.在这里你可以开始下载,作为一个zip文件通过点击绿色的代码元素。Plex3r关于修改Eggbot扩展的说明,不幸的是,在较新的软件版本中并不适用。
最新的EggBot 2.81版本是从Evil Mad Scientist的资源库中下载的并进行修改。你将需要两个档案 eggbot-inkv1r2.zip和EggBotExamples_v281.zip从发布文件夹中下载。
对Arduino Uno进行编程
安装完Arduino IDE后,打开EggDuino-master.zip文件,并将其解压到用户文件夹Documents/Arduino中。为了使IDE能够使用该文件夹的内容,它必须被重命名为EggDuino。在重命名的EggDuino文件夹中双击EggDuino.ino来打开该文件。现在你可以通过USB线将Arduino Uno(克隆)连接到电脑上。用工具>端口选择板子。然后你按原样上传程序。后来,一切都以编程的引脚匹配的方式连接。
开发板的硬件ID是需要的,以便在下一步将EggBot的Inkscape扩展改编到EggDuino上。这个ID可以在Arduino IDE中通过 "工具">"获取板子信息 "检索出来。VID和PID可以通过CTRL+C复制,然后粘贴到一个文本文件中。




EggBot扩展的安装和修改
zip文件eggbot-inkv1r2.zip包含了Inkscape的完整EggBot扩展。然而,这个扩展必须在集成到Inkscape之前适应EggDuino。首先在一个任意的地方解压该压缩包。在解压后的文件夹中,搜索文件ebb_serial.py。它位于 eggbot-inkv1r2axidraw_depsplotink 下。用编辑器打开,可以对Python脚本进行编辑。在第65行[ if port[2].startswith("USB VID:PID=04D8:FD92"): ] 脚本搜索了原始EggBot的硬件ID。这必须改变为Eggduino的VID和PID的先前确定的值。
所以在我的例子中,新的一行是。[ if port[2].startingwith("USB VID:PID=2341:0043")。]
因为不是每个Arduino Uno和它的克隆体都有相同的硬件ID,简单地复制我的改动可能不会成功。

保存修改后,eggbot-inkv1r2文件夹中的全部内容将被转移到Inkscape 1.1的扩展文件夹中。如果在安装过程中没有改变默认的安装目录,它位于。
C:Program FilesInkscapeshareinkscapeextensions
如果你现在打开Inkscape,你应该能在Extensions下找到Eggbot。


装配
组件的一般组装应该是简单的,但处理布线可能有点棘手。由于Arduino Uno的容错率很高,所以一般来说,错误并不是什么大问题。
步进电机驱动器

首先,应设置跳线以调整微步进。根据步进电机驱动器的不同,跳线的设置也不同。其目的是为了实现1/16的微步进。对于上面链接的CNC套件中的A4988驱动器,所有三个跳线都必须被设置。在右边的图片中,相应的位置被标记为绿色,连接为黄色。M0、M1和M2必须被连接。对于Eggbot来说,只有X-和Y-电机是必要的。

在下一步,将散热器粘在步进电机驱动器上,并将驱动器插入X和Y的插槽中。这里你必须注意对齐。通常情况下,所有Pololu兼容的步进电机驱动器上都标有EN引脚。必须将其连接到 CNC 屏蔽上的 EN 插座,只有这样才能正确对齐。
关于电压和微型步进及电流的设置信息,请参考各制造商的数据表。
停用Arduino Uno的自动复位功能


为了与Inkscape正常连接,有必要禁用Arduino的自动复位功能。第一个可能性是断开Arduino UNO上的一个触点。在板子上总是有一个跳线触点,它被标记为REST-EN或REST-ON。在板子被编程后,这个触点可以用刀断开。如果你需要再次自动复位,你可以设置一个焊接桥。
也可以在复位引脚和 CNC 屏蔽上的 GND 引脚之间使用一个电容来禁用自动复位。该电容器的容量必须至少为 10 µF。电解电容器的负极与 CNC 屏蔽的 GND 引脚焊接在一起。陶瓷和铝箔电容器没有极性。电容器的介电强度应至少是所选电源电压的 1.5 倍。
接线
所有的Eggbots使用两个步进电机和一个伺服电机。转动球或蛋的步进电机与X-驱动器的触点相连,笔臂的步进电机与Y-驱动器旁边的触点相连。这两个接头的连接方式只改变了旋转的方向。这可以在以后的Inkscape中反过来。
伺服马达的三根线连接到 CNC-Shield 的 5V、GND 和 Z.STEP 针脚。黑线接GND,红线接5V,黄线接Z.STEP。


软件设置和绘图
一旦一切都组装好了,Arduino就可以连接到PC上,CNC-Shield连接到电源上。在Inkscape中,你现在可以调用Eggbot的控制面板,在这里你还需要设置伺服电机的设置和步进电机的旋转方向。为了找到正确的设置,你必须进行一些实验。
在 "手动 "选项卡中,你可以首先确定笔臂的旋转方向。从下拉菜单中选择步进电机1(笔),在下面输入一个正值,然后点击应用。现在笔应该向带有装饰品钩子的小饰品的顶端移动。因此,根据你想夹住小球的哪个方向,这是向左或向右。用所选的菜单项目重复同样的过程,行走马达2(蛋)。从悬挂点看,球应该顺时针旋转。
如果旋转方向不一致,必须在选项标签中为相应的电机设置或删除 "电机的反向运动 "复选框。




伺服电机的数值也必须进行调整。这里取决于你是否有一个正向或负向旋转的伺服电机。在我的例子中,在Eggbot控制设置中为笔向上的位置设置的值要比笔向下的位置小。你可能需要尝试一些数值来找到正确的数值。
绘图

一旦所有东西都组装、安装和设置好了,你终于可以开始绘图了。在EggBotExamples_v281.zip档案中,有一些用于不同场合的模板。这些模板可以按照你的意愿加载、修改和绘制。文件EggBotTemplate.svg可以作为你设计的模板。当打开一些模板时,Inkscape可能会询问文件中是否有什么需要修改,因为它们是用旧版本的Inkscape创建的。新的Eggbot扩展已经适应了Inkscape 1.1的要求,你必须在这里选择 "此文件用于屏幕显示[...]",否则Eggbot上的输出会失真。
有了完成的设计,你不需要做任何其他事情,只需要通过Eggbot控制中心来绘制它。只需在绘图选项卡中点击 "应用"。

资料来源

